I. システムの概要
1. プロジェクトの背景
近年、高速道路貨物車両の違法輸送は深刻な問題となり、全国の道路交通の安全を脅かしています。高速道路や橋梁に過積載を引き起こし、道路や橋梁の耐用年数を大幅に短縮するとともに、車両の安全係数を大幅に低下させ、交通事故を継続的に発生させ、交通渋滞や環境汚染を引き起こしやすくしています。
全国各級政府は、高速道路車両の過積載輸送の取り締まりに継続的に力を入れており、段階的に重要な成果を上げている。しかし、複雑な社会経済要因により、全国の過積載検知状況は依然として厳しく、リバウンドの潜在的危険性も排除されていないため、ガバナンスの成果を固め、過積載検知業務を継続的に推進することは依然として大きな圧力にさらされている。そのため、過積載輸送車両のガバナンスは長期的かつ日常的な作業であり、粘り強く取り組む必要がある。過積載業務のガバナンスを長期的なメカニズムに組み込むことが極めて重要である。過積載車両に対する法的抑止効果を発揮するほか、その機能を道路検査にまで拡大し、違法輸送業務のまぐれな心理を取り締まり、過積載輸送を含む各種の違法輸送業務を適時に取り締まり、排除することもできる。
2. 計量システムの紹介
静的トラックスケールの計量原理は、すべての車両を計量台に駐車し、車両全体を計量することです。高い計量精度と国家基準クリアを誇ります。しかし、従来のトラックスケールは車両全体の重量しか計測できず、車軸重量は計測できません。車両全体の過積載状態は判定できますが、車軸重量が過積載状態にあるかどうかは判定できません。そのため、道路管理部門の過積載輸送管理の目的を達成するための要件を満たすことができません。
この計画は、当社が長年培ってきた過積載検知装置の設計・製造経験と、全国各地での実際の適用実績を融合させ、市場に流通している様々な過積載検知装置の使用状況を綿密に研究し、高速道路管理部門の過積載輸送管理に対する具体的なニーズを総合的に考慮したものです。先進技術と独自の設計思想を採用し、動態高精度の車両重量・車軸種別検知システムを開発しました。車軸重量と総重量の両方を計測でき、車軸種別の判別も可能です。車軸重量の精度も大幅に向上します。
2. オーバーロードとオーバーリミットシステムの構成
1. システムの特徴
低速で通過する車両の重量を計測し、車両重量または車軸重量が過積載かどうかを自動的に判断します。
車両の車軸数、車軸グループ、車軸重量、車両重量を検出できます。
車軸タイプ、車軸重量、車軸グループ、総重量などの完全な車両重量情報を形成できます。
データ インターフェイスを介して計量情報をコンピューターに送信できます。
システムの中核部分には成熟した信頼性の高い機器が採用されており、すべてモジュール設計を採用しているため、保守や拡張が容易で、システムの高い信頼性を確保しています。
システムソフトウェアは成熟しており、信頼性が高く、データは完全かつ有効であり、完全に共有できるため、作業効率が効果的に向上し、さまざまな管理上の抜け穴が最大限に排除されます。
2. システムプロセス
トラックは過積載ステーションの計量レーンに導入され、ナンバープレート認識システムがナンバープレートの番号を識別します。
タイヤ(車軸)識別装置が車軸の数を識別し、車両計量システムが計量を開始し、車軸グループを決定し、車軸重量を計算します。
すべての車両が車両分離装置を通過して計量台に入り、秤が比較的バランスの取れた状態になると、車両の総重量が記録され、車軸重量が得られます。
計量システムは、計量情報(ナンバープレート番号、車軸数、軸重、車両総重量など)を検知コンピュータに送信します。コンピュータは、制限超過の有無を判定し、車両重量、制限超過量、制限超過率などの検知情報をディスプレイに表示します。
車両が関連操作を完了した後、車両誘導員はディスプレイ画面の情報に従って、制限を超えていない車両を検査エリアから退出させ、制限を超えた車両をステーションエリアに誘導して処理させ、制限を超えた車両検査フォームを印刷し、関連する課金操作を実行します。
3. システム構成と配置計画
3.1 システム構成
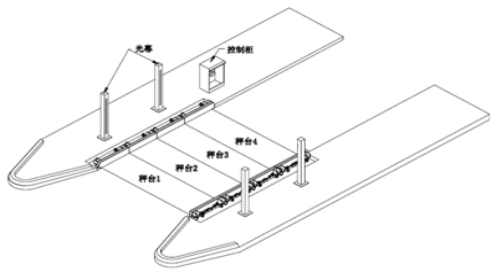
制限超過および過負荷システムは、ZDG 4 テーブル動的車軸計量器、制御機器、赤外線車両分離器、計量プラットフォーム車輪車軸識別器、制御キャビネット、(オプション装備: ナンバープレート認識システム、LED 大画面表示システム、音声プロンプトシステム、車両誘導システム、産業用コンピューター、チケットプリンター、UPS 無停電電源装置、制限超過および過負荷検出システムソフトウェア、監視システム) およびその他の付属品およびケーブルで構成されています。
3.2 システムレイアウト図は次のようになります。
ワークフロー:
1) 車両が安全な距離を保ちながら順番に車線に入り、赤外線車両分離装置が作動します。
2) 車両の各車軸が多面計量プラットフォームを通過します。
3)表示コントローラは、計量台のセンサーから取得した計量信号と車輪センサー信号を処理し、論理条件に従って車軸を分離し、特殊な状況を効果的に処理します。
4) 車両の後部が多面計量プラットフォームと赤外線車両分離装置を離れる。
5)表示コントローラは、赤外線車両分離装置によって検出された閉塞信号と計量センサーによって得られた計量信号に基づいて、車両端信号を総合的に判断する。
6)表示コントローラは、上記車両が計量台を通過した際に得られる計量信号を処理する。
7) 表示コントローラは、車両全体の完全な計量情報を形成し、完全な計量情報には、車両速度、車軸タイプ、車軸重量、車軸グループ重量、総重量などが含まれます。
8) 1台の車両の計量を完了し、次の車両の計量が終了するまで待ちます。
9) 作業プロセス全体を通じて、システムは、完全な進入と完全な退出、繰り返しの進入と退出、計量プラットフォーム上での長時間の滞在など、さまざまな特殊な状況を自動的に処理します。
システムは後続車両の状況を自動的かつ効果的に処理することができ、後続車両の重量測定はデータの精度に影響を与えません。

投稿日時: 2025年2月20日